 |













| MODEL: | |
|---|---|
| Quantidade: | |
XHY
DLL
ESPECIFICAÇÃO
DELICATESSEN
ZHEJIANG DELI CONECTORES CO., LTD
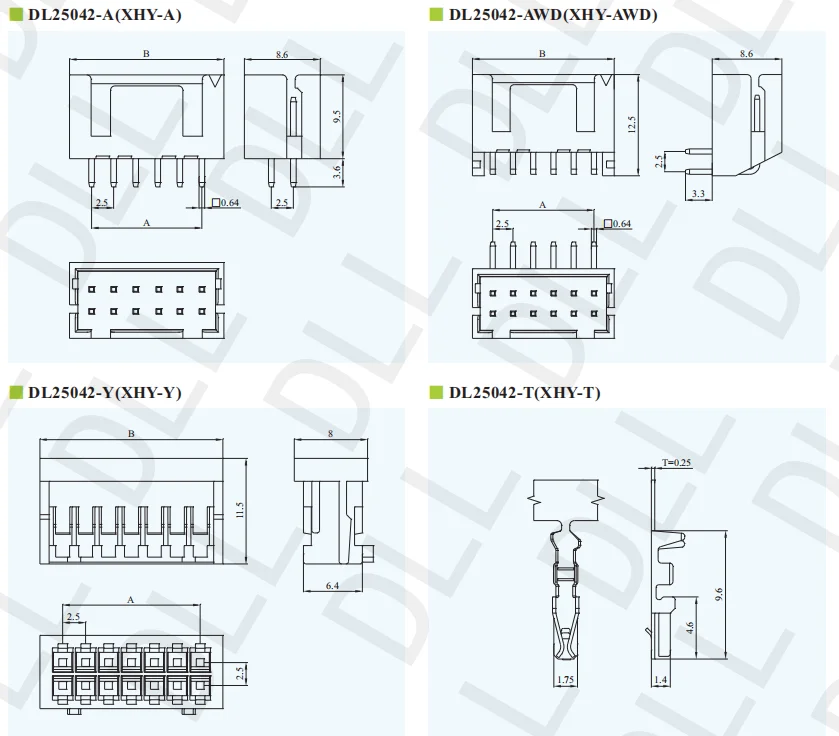
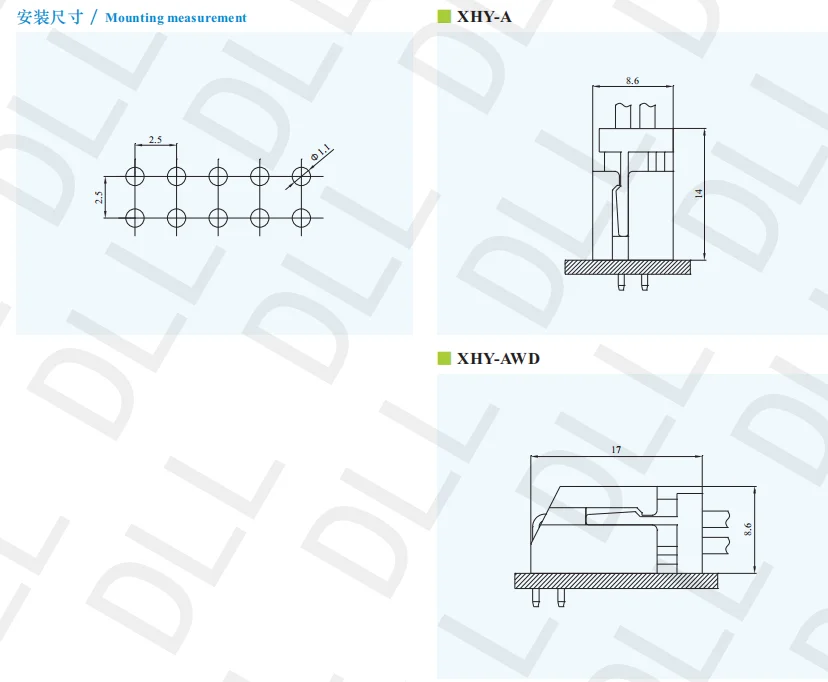
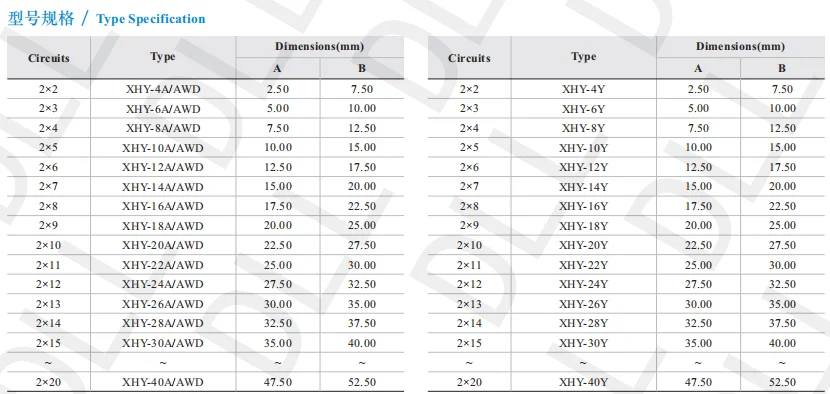
substitua o conector de cabeçalho de pino xhy de 2,5 mm; conector de cabeçalho de pino xhy de 2,5 mm horas
Tensão nominal: | 250 V CA, CC |
Corrente nominal: | 3A CA, CC |
Resistência de contato: | 30MΩ máx. |
Resistência de isolamento: | 1000MΩ min |
Tensão suportável: | 650 Vca/minuto |
Temperatura: | -25℃~+85℃ |
MATERIAL
DELICATESSEN
ZHEJIANG DELI CONECTORES CO., LTD
Habitação: | (Nylon) UL94-V0(2) |
Terminal: | Bronze de fósforo, estanhado |
Bolacha: | (Nylon) UL94-V0(2) |
Mais produtos para você escolher:

Aplicativo
Sistema de controle do robô: No acionamento conjunto, aquisição de sinal do sensor e sistema de controle do robô, o conector de agulha reta XHY pode ser usado para conectar componentes como motores, codificadores e sensores de força. Por exemplo, o motor é conectado ao controlador de articulação do robô através de um conector de pino reto para obter controle preciso do movimento das articulações; O codificador realimenta as informações de posição e velocidade da junta para o sistema de controle através de um conector de agulha reta, obtendo controle de malha fechada.
ESPECIFICAÇÃO
DELICATESSEN
ZHEJIANG DELI CONECTORES CO., LTD
substitua o conector de cabeçalho de pino xhy de 2,5 mm; conector de cabeçalho de pino xhy de 2,5 mm horas
Tensão nominal: | 250 V CA, CC |
Corrente nominal: | 3A CA, CC |
Resistência de contato: | 30MΩ máx. |
Resistência de isolamento: | 1000MΩ min |
Tensão suportável: | 650 Vca/minuto |
Temperatura: | -25℃~+85℃ |
MATERIAL
DELICATESSEN
ZHEJIANG DELI CONECTORES CO., LTD
Habitação: | (Nylon) UL94-V0(2) |
Terminal: | Bronze de fósforo, estanhado |
Bolacha: | (Nylon) UL94-V0(2) |
Mais produtos para você escolher:
Aplicativo
Sistema de controle do robô: No acionamento conjunto, aquisição de sinal do sensor e sistema de controle do robô, o conector de agulha reta XHY pode ser usado para conectar componentes como motores, codificadores e sensores de força. Por exemplo, o motor é conectado ao controlador de articulação do robô através de um conector de pino reto para obter controle preciso do movimento das articulações; O codificador realimenta as informações de posição e velocidade da junta para o sistema de controle através de um conector de agulha reta, obtendo controle de malha fechada.